Detail výsledku
Řídicí systém autopilota
Chudý Peter, doc. Ing., Ph.D., MBA, UPGM (FIT)
Rydlo Karol, Mgr., UPGM (FIT)
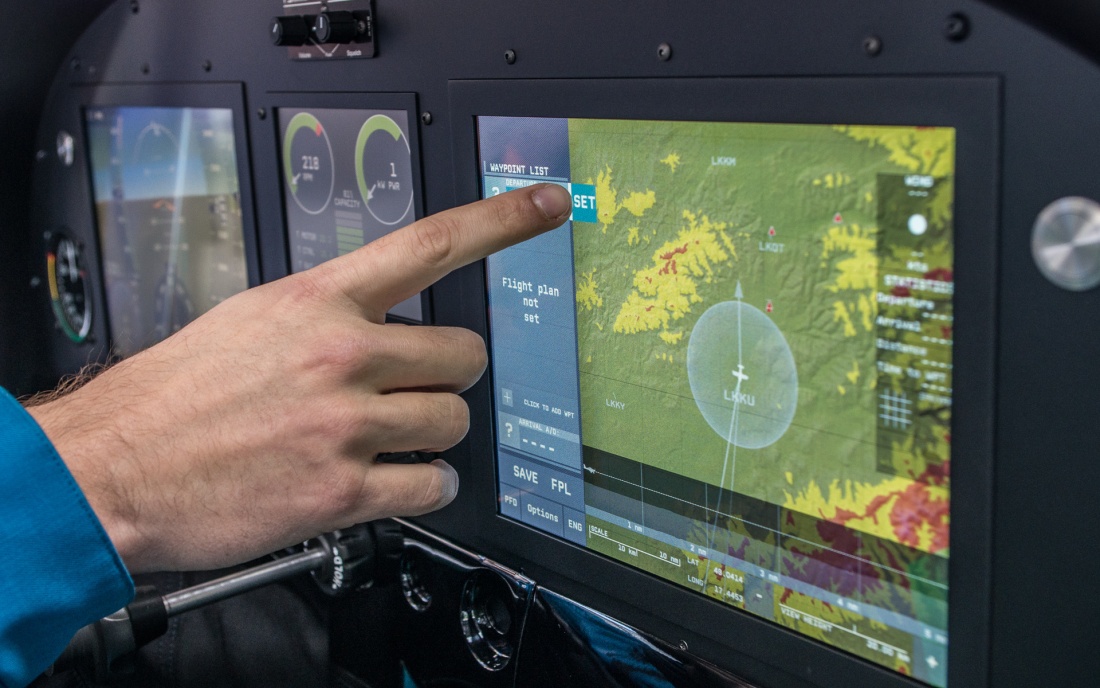
Softwarová implementace řídicího systému "chytrého autopilota"zpřístupňuje obsluze prvky automatického podélného a stranového řízení letounu.Obsluha systému tak má k dispozici volby módů stabilizace indikovanévzdušné rychlosti, letové výšky, letu podle zvoleného kurzu nebo letu potrajektorii definované traťovými body. Zákony řízení jsou formálně rozděleny dohierarchických úrovní podle rozsahu a povahy řídicí úlohy.
Software implementation of the "Smart Autopilot"introduces modes for the automatic longitudinal and lateral-directional flightcontrol. The user may select from Indicated Airspeed, Altitude and Trackstabilization modes or an automatic flight along a trajectory defined by a setof waypoints. Flight control laws are formally divided into three hierarchicallevels based on the extent and type of the control task.
autopilot, řízení letu, módy stabilizace letu, mód řízení IAS, mód řízení ALT, mód řízení TRK, trajektorie letu
Autopilot, Flight Control, Flight Mode Stabilization, IAS Control, ALT Control, TRK Control, Flight Trajectory
Laboratoř Aeroworks (místnost L209), Fakulta informačních technologií VUT v Brně, Božetěchova 2, 612 66 Brno http://www.fit.vutbr.cz/research/prod/index.php.cz?id=347
Pro informace o licenčních podmínkach prosím kontaktujte ÚTT VUT v Brně.
Útvar transferu technologií
Vysoké učení technické v Brně
Kounicova 966/67a
601 90 Brno
telefon: 541 144 217
fax: 541 144 232
e-mail: info@tt.vutbr.cz
http://www.vutbr.cz/utt
{kind=link}